回転行列への展開:三次元(空間)
一つの座標軸を中心に座標系を回転させる時の回転行列
㉒式の行列 R の各行ベクトルは、上から順に変換後の X1->Y1->Z1 軸の方向余弦
Z軸廻りのψ回転
まず、Z軸廻りにψ回転させる。
1行目の方向余弦の角度α0、β0、γ0は、定義より変換前のX0軸 、Y0軸 、Z0軸と変換後のX1軸のなす角となる(図4)。つまり、
\( \alpha_0=\psi \)、\( \beta_0=\displaystyle\frac{\pi}{2}-\psi \)、\( \gamma_0=\displaystyle\frac{\pi}{2} \)
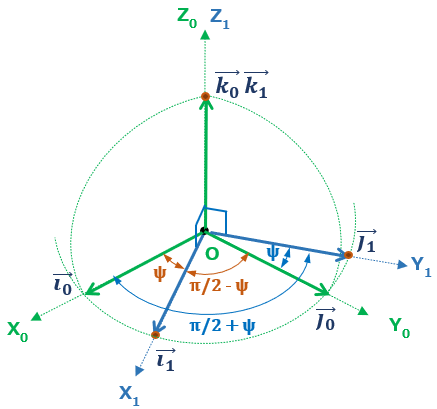
同様に、2行目の行ベクトル(Y1軸となす角)は
\( \alpha_1=\displaystyle\frac{\pi}{2}+\psi \)、\( \beta_1=\psi \)、\( \gamma_1=\displaystyle\frac{\pi}{2} \)
3行目の行ベクトル (Z1軸となす角)は、
\( \alpha_2=\displaystyle\frac{\pi}{2} \)、\( \beta_2=\displaystyle\frac{\pi}{2} \)、\( \gamma_2=0 \)
この時の回転行列を Rψ とすれば
\(\begin{align}
R_\psi &=\small{ \left( \begin{array}{ccc}
\cos\alpha_0 & \cos\beta_0 & cos\gamma_0 \\
\cos\alpha_1 & \cos\beta_1 & cos\gamma_1 \\
\cos\alpha_2 & \cos\beta_2 & cos\gamma_2
\end{array} \right ) }
=\small{ \left( \begin{array}{ccc}
\cos\psi & \cos(\displaystyle\frac{\pi}{2}-\psi ) & cos\displaystyle\frac{\pi}{2} \\
\cos(\displaystyle\frac{\pi}{2}+\psi) & \cos\psi & cos\displaystyle\frac{\pi}{2} \\
\cos\displaystyle\frac{\pi}{2} & \cos\displaystyle\frac{\pi}{2} & cos 0
\end{array} \right )} \\[8pt]
&=\small{ \left( \begin{array}{ccc}
\cos\psi & \sin\psi & 0 \\
-\sin\psi & \cos\psi & 0 \\
0 & 0 & 1
\end{array} \right )} ・・・㉔
\end{align} \)
そのまま続いてY軸廻り、X軸廻り。
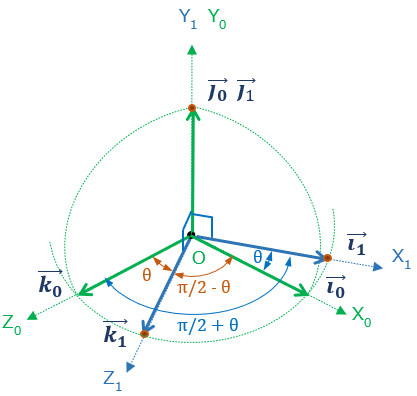
Y軸廻りのθ回転
Y軸廻りにθ回転させる回転行列Rθ はRψと同様に算出すれば(図5)
\(\begin{align}
R_\theta &= \small{\left( \begin{array}{ccc}
\cos\alpha_0 & \cos\beta_0 & cos\gamma_0 \\
\cos\alpha_1 & \cos\beta_1 & cos\gamma_1 \\
\cos\alpha_2 & \cos\beta_2 & cos\gamma_2
\end{array} \right ) }
= \small{\left( \begin{array}{ccc}
\cos\theta & cos\displaystyle\frac{\pi}{2} & \cos(\displaystyle\frac{\pi}{2}+\theta )\\
\cos\displaystyle\frac{\pi}{2} & cos 0 & \cos\displaystyle\frac{\pi}{2}\\
\cos(\displaystyle\frac{\pi}{2}- \theta) & cos\displaystyle\frac{\pi}{2} & \cos\theta
\end{array} \right ) }\\[8pt]
&=\small{ \left( \begin{array}{ccc}
\cos\theta & 0 & -\sin\theta \\
0 & 1 & 0 \\
\sin\theta & 0 & \cos\theta
\end{array} \right )} ・・・㉕
\end{align} \)
X軸廻りのφ回転
X軸廻りにφ回転させる回転行列Rφ も Rψ と同様に求めれば(図6)
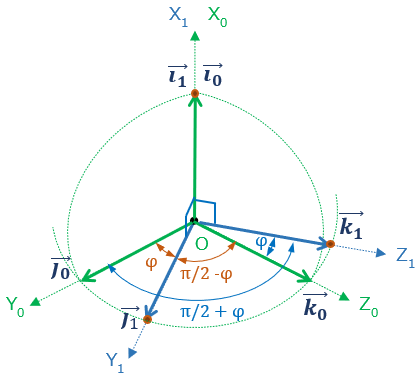
\(\begin{align}
R_\phi &= \small{\left( \begin{array}{ccc}
\cos\alpha_0 & \cos\beta_0 & cos\gamma_0 \\
\cos\alpha_1 & \cos\beta_1 & cos\gamma_1 \\
\cos\alpha_2 & \cos\beta_2 & cos\gamma_2
\end{array} \right ) }
= \small{\left( \begin{array}{ccc}
cos 0 &\cos\displaystyle\frac{\pi}{2} & \cos\displaystyle\frac{\pi}{2}\\
cos\displaystyle\frac{\pi}{2} &\cos\phi & \cos(\displaystyle\frac{\pi}{2}-\phi )\\
cos\displaystyle\frac{\pi}{2} &\cos(\displaystyle\frac{\pi}{2}+\phi) & \cos\phi
\end{array} \right )} \\[8pt]
&= \small{\left( \begin{array}{ccc}
1 & 0 & 0 \\
0 &\cos\phi & \sin\phi \\
0 & -\sin\phi & \cos\phi
\end{array} \right )} ・・・㉖
\end{align} \)
この㉔、㉕、㉖式が、オイラー角へ続く。