はじめに
今回もこの二冊がベース。 前回と同じ ”ねじ締結の原理と設計”と”ねじ締結概論”。
以下の記事の ”ねじ面に作用するトルク Ts ” に使う水平力”U”の詳細説明。

水平力”U”は、この式
\( \tt \displaystyle U=F_s \cdot (\frac {{\pm}P}{\pi d_p}+ \frac {{\mu}_s}{\cos {\alpha}} ) \) ・・・⓪
- 発生軸力:Fs
- ねじピッチ:P
- ねじの有効径:dp
- ねじ面の摩擦係数:μs
- ねじの山の半角:α
- 水平方向にかける力:U
を斜面の定理( U= F tan( θ + ρ0) )から求める。
ただねじ面の場合、斜面が
- 斜面の角度であるねじのリード角:β
- 斜面のバンク角度であるねじ山の半角:α
の合成した角度の斜面となっているため、斜面の定理はそのままでは使えない。
この部分は持っている参考書、ちょっとわかりづらかったので、力のつり合いから書き直し。。。
次のページは、そのねじ面の力のつり合いから
力のつりあいの概要
バンク角 α をもつ 斜面角 β の斜面に沿って物体を押し上げる場合を考える。
座標軸と斜面の定義
基準の座標軸はO-X0Y0Z0 とし(図1正面図参照)、斜面上に原点O、水平方向にX0軸、重力方向にY0軸をとる。(Z0軸は、座標系を右手系にとる事により自動的に決まる)
続いて、追加の座標系として
- O-X0Y0Z0をZ0軸廻りにβ回転したものをO-X1Y1Z1
- O-X1Y1Z1をX1軸廻りに α’回転させたものをO-X2Y2Z2
とする。
Note: ここでα’はバンク角α(=ねじ山の半角)を斜面角βから見た角度。つまり
\( \tan{\alpha’}= \tan{\alpha} \cos {\beta} \) ・・・①
(∵ \( \tan{\alpha}= \tt \displaystyle \frac {\frac {P}{2}}{h} \) より、\( \tt\displaystyle \tan{\alpha’}= \frac {\frac {P}{2} \cos {\beta} }{h}= \tan{\alpha}\cos {\beta} \) : P ねじピッチ、 h ねじ山高さ)
である。
斜面上の力のつり合い
さて、バンク角付きの斜面上の力のつり合いを一通り図示すると、
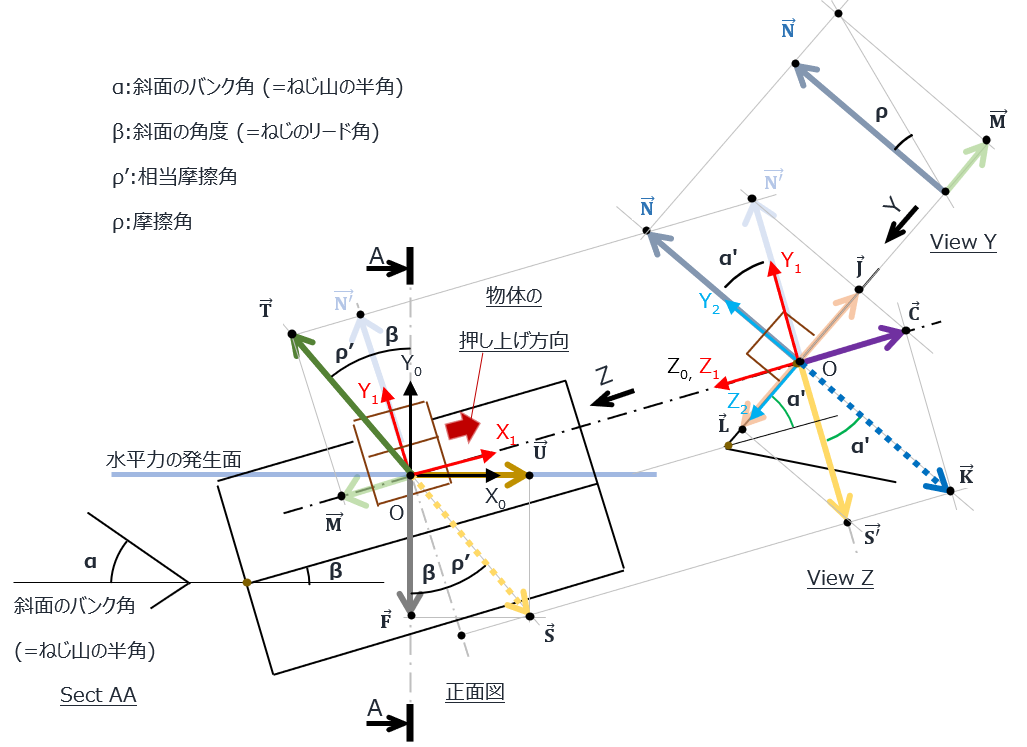
ここで水平力は \( \tt \vec{U} \) 、重力を \(\tt \vec{F} \) 、その双方に垂直な力を \( \tt \vec{C} \)、斜面に発生する垂直抗力を\( \tt \vec{N} \)、発生する摩擦力を \( \tt \vec{M} \) とする。
斜面角β方向
相当摩擦角の導入し、一旦斜面角β方向で斜面の定理を成立させる。
つまり、仮の摩擦係数\( \tt \mu’=\tan{\rho}’\)を導入(相当する摩擦角を\( \rho’ \) & 対応する垂直抗力を \(\tt \vec{N}’ \) )として、この方向で斜面の定理を成立させ、\( \tt|\vec{U}| \) を、
\( \tt |\vec{U}| = |\vec{F}| \tan( \tt {\beta+\rho’}) \) ・・・②
で表す。つまり、
\( \tt |\vec{M}| = \tan{\rho’} \tt |\vec{N}’ |\) ・・・②-1
バンク角α方向
続いて、\(\tt \vec{U} と\vec{F} \) の合力を \( \tt \vec{S}\) とする。
この\( \tt \vec{S}\) をY1Z1平面へ投影したベクトルを \( \tt \vec{S}’\)とし(図1 View Z)、この\( \tt \vec{S}’\)に着目してバンク角α方向の斜面のつり合いを考える。
物体がバンク角方向にずり落ちる方向の力は、この\( \tt \vec{S}’\) の分力 \( \tt \vec{L}\)。
物体はバンク角方向にはずり落ちない事を前提としているので、これを支える力\(\tt \vec{J}\) (図2参照)(バンク角方向の摩擦力を含んだ力)とつり合っている事になる。
また、この\(\tt \vec{J}\) はバンク角方向の斜面の物体の位置を維持する力\( \tt \vec{C} \)の分力として発生する。
つまり、\( \tt|\vec{C}| \) は、
\( \tt |\vec{C}| = |\vec{S}’| \tan{\alpha} \)
明らかに(\( \tt \vec{S}’\)と\( \tt \vec{C}\)の合力) \( \tt \vec{K}\) はバンク角αの斜面に垂直。
つまり\( \tt \vec{K}\) の反力 \( \tt \vec{N}\) が求める垂直抗力。この\( \tt \vec{N} \)と摩擦角 ρを使えば、摩擦力
\( \tt |\vec{M}| = \tan{\rho} \tt |\vec{N}|\) ・・・②-2 (摩擦係数 μ=tanρ( ρ:摩擦角))。
を導く事ができる。
力のつり合いまとめ
計算に入る前に一旦力のつり合いのまとめ。
結局のところ、摩擦力を計算するのに垂直抗力から求めるのは変わらないが、バンク付き斜面で3次元で考えなければならないのが、ちょっと面倒なトコロ。
簡単には、O-X0Y0Z0座標系の合力ベクトルである\(
\left (
\begin{array}{c}
\tt |\vec{U}| \\ \tt -|\vec{F}| \\ \tt -|\vec{C}|
\end{array}
\right )
\) に対する反力ベクトルに対して、O-X2Y2Z2座標系(バンク付き斜面の座標軸)から求めた\(
\left (
\begin{array}{c}
\tt -|\vec{M}| \\ \tt |\vec{N}| \\ \tt |\vec{L}|
\end{array}
\right )
\) の成分の大きさから求めたρと ρ’ の関係を②式に展開すれば、摩擦係数と水平力と重力の関係式が求まる
(ねじ面で言えば、”摩擦係数” & ”入力トルクによる力” & ”発生する軸力” の関係式)。
Note:ねじ面を前提とすれば\( \tt \vec{C} \) 全周にわたって発生するため円周上でつり合う。
-> 外部からの \( \tt \vec{C}\) の調整はない
さて続いて、各ベクトルの大きさの計算を。
各ベクトルの大きさ
さて成分計算。図1から力のつり合いを追いかけて算出するのが簡単。

まず、\( \tt \vec{S} \)の大きさから、、
\( \tt |\vec{S} |= \displaystyle \frac {\tt |\vec{F} |}{\cos( {\beta+\rho’}) } \) ・・・③
これを使えば、\( \tt \vec{S}’、\vec{N}’ \) の大きさは
\( \tt |\vec{S}’ |= |\vec{N}’|= |\vec{S} | \cos{\rho’} =\displaystyle \frac {\tt |\vec{F} | \cos{\rho’} }{\cos( {\beta+\rho’}) } \) ・・・④
ここから、\( \tt \vec{K}、\vec{N} \)の大きさは
\( \tt |\vec{K} | = |\vec{N}| = \displaystyle \frac {|\vec{S}’ |}{\cos{\alpha}’} = \displaystyle \frac {\tt |\vec{F} | \cos{\rho’}}{\cos( {\beta+\rho’}) \cos{\alpha}’ } \) ・・・⑤
と求まる。
(ついでに、 \( \tt |\vec{C} | = \tt |\vec{S}’| \tan{\alpha}’= \displaystyle \frac {\tt |\vec{F}| \cos{\rho’}\tan{\alpha}’ }{\cos( {\beta+\rho’}) } \) ・・・⑥ )
さて⑤式と、②-1&②-2式の \( \tt |\vec{M} |= |\vec{N}’ |\tan{\rho}’ = N\tan{\rho} \)を使えば、
\( \tt \tan{\rho}’ =\displaystyle \frac {N\tan{\rho}}{N’} = \frac {\tan{\rho}}{\cos{\alpha}’} \) ・・・⑦
が求まる。
斜面の定理のねじ面への展開
さて、②式の再登場させる
\( \tt |\vec{U}| =\tt |\vec{F}| \tan({\beta+\rho’}) ・・・② \)
β角の小さいねじ面を前提として近似を使って式を簡易化していく。先に書けば、近似結果はこうなる
\( \tt |\vec{U}| ≒ \tt|\vec{F}| (\tan{\beta} + \displaystyle \frac {\tan{\rho}}{\cos{\alpha}} ) \)・・・⑧
-> ②式から⑧式に至る過程で⑦式を使うが、ちょっとわかりにくいので詳細は次章 補足にて。一旦結論まで。
この⑧式にねじの諸元を当てはめる。
\(\tt |\vec{U}|=U、\tt |\vec{F}|=F_s、\tan{\beta} =\frac {P}{\pi d_p}、\mu_s =\tan{\rho} \) を使えば冒頭の⓪式が求まり、
\( \tt U = F_s \cdot (\displaystyle \frac {P}{\pi d_p}+ \displaystyle \frac {\mu_s}{\cos {\alpha}}) \)
緩め側も含めれば、
\( \tt U = F_s \cdot (\displaystyle \frac {{\pm}P}{\pi d_p}+ \displaystyle \frac {\mu_s}{\cos {\alpha}}) \)
これにねじ面の有効半径 \( \tt \frac {d_p }{2} \) をかけてやれば、ねじ面に作用するトルクTsと発生する軸力の関係が求まる。
以下である。
\( \tt T_s = \displaystyle \frac {F_s }{2} \cdot (\displaystyle \frac {{\pm}P}{\pi}+ \displaystyle \frac {\mu_s \cdot d_p}{cos {\alpha}}) \)
これに座面に作用するトルクTwを足し合わせれば、入力するトルクTfと軸力の関係式が求まる。
詳細は先の記事にて。
補足:近似による誤差
補足にて、⑧式の導入に使われる近似について確認。
というのも、”ねじ締結概論”では\( \beta\)が小さい事から、\( \rho’\)=\( \rho \)、\( \alpha’\)=\( \alpha \) を近似的に(近似”的”って?ん?)、また”ねじ締結の原理と設計”では近似が含まれる \( \tt \frac {1}{\cos{\alpha}’}\)を、”=1.155″ と定数化してあったり(ん?)で、その近似の詳細は省略??、、、で、ん?ん?と。。。
で、気づいた。ん?の原因は、ねじ面を前提として近似が使われている事が頭の中から抜けていたせい。。。
まず、②式から⑧式への計算の流れ(近似込み)は
\(
\begin{align}\tt |\vec{U}| &= \tt |\vec{F}| \tan({\beta+\rho’}) ≒\tt |\vec{F}| (\tan{\beta}+\tan{\rho’}) \\[8pt]
&= \tt |\vec{F}| (\tan{\beta}+\displaystyle \frac {\tan{\rho}}{\cos{\alpha}’} )≒\tt |\vec{F}| (\tan{\beta}+\displaystyle \frac {\tan{\rho}}{\cos{\alpha}} )\\[8pt]
\end{align}
\)
これが大枠の流れ。
さて最初の近似、この部分から確認
\( \tt |\vec{U}| = \tt |\vec{F}| \tan({\beta+\rho’}) ≒\tt |\vec{F}| (\tan{\beta}+\tan{\rho’})\)
ん、大胆すぎない?とも思ったが、tanの加法定理の近似を図示すれば
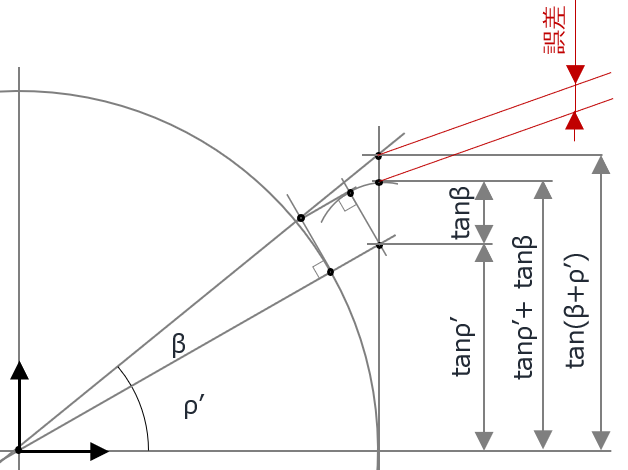
この近似は”βが小さい”&”ρ’が小さい”程 近似の精度は上がる。これが参考書に書いてある”βが小さい”の意味。
念のため、近似のレベル確認。
ねじ面である事を踏まえよく使う範囲として、摩擦係数μ(tanρ)は大体0.2-0.3ぐらい、βは大体3°(tanβでいえば0.05)ぐらいを想定して計算してみると、
誤差はだいたい1.5%ぐらい発生(大体の目安)
ちなみに摩擦係数μの最大を0.5、βを最大4°(tanβ=0.08)で計算すると、最大誤差は4%程度ぐらいで発生(こちらも目安)。<- 以下の表、誤差Maxが3.67 %
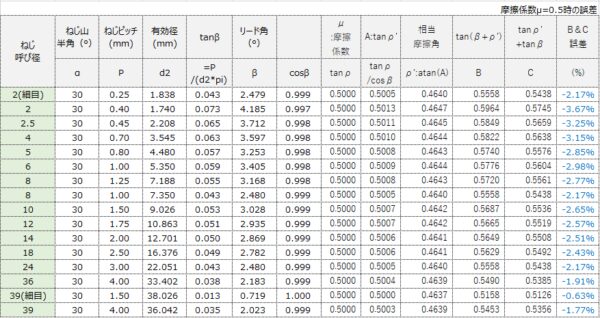
近似式とするには誤差が結構大きい気もするが、摩擦係数(tanρ)自体のバラつきが±30%ある事も踏まえれば、まぁ、実用範囲内かと。(参考書にも、近似式と書かずに近似”的”って書いているし。。)
さて、計算を続ける。⑨式に⑦式を代入して
\( \tt |\vec{U}| ≒\tt |\vec{F}| (\tan{\beta}+\tan{\rho’}) =\tt |\vec{F}| (\tan{\beta}+\displaystyle \frac {\tan{\rho}}{\cos{\alpha}’} ) \)
ここから二つ目の近似部分。
\(
\begin{align}\tt |\vec{U}|
&≒\tt |\vec{F}| (\tan{\beta}+\displaystyle \frac {\tan{\rho}}{\cos{\alpha}’} )\\[8pt]
&≒\tt |\vec{F}| (\tan{\beta}+\displaystyle \frac {\tan{\rho}}{\cos{\alpha}} )・・・⑧
\end{align}
\)
これには、①式の \( \tan{\alpha’}= \tan{\alpha} \cos {\beta} \) の関係を使う。ねじを前提とすれば斜面の勾配角βはねじのリード角に該当し、これは最大でも5°以下。
このβを踏まえ、\( \cos {\beta}≒1 \) として、①式は\( \tan{\alpha’}≒ \tan{\alpha} \)と近似。ここから\( \cos{\alpha’}≒ \cos{\alpha} \)。
念のため、ねじ諸元ベースで確認してみるとこの誤差は0.1%未満(以下の表 cosα’/cosα 参照)。
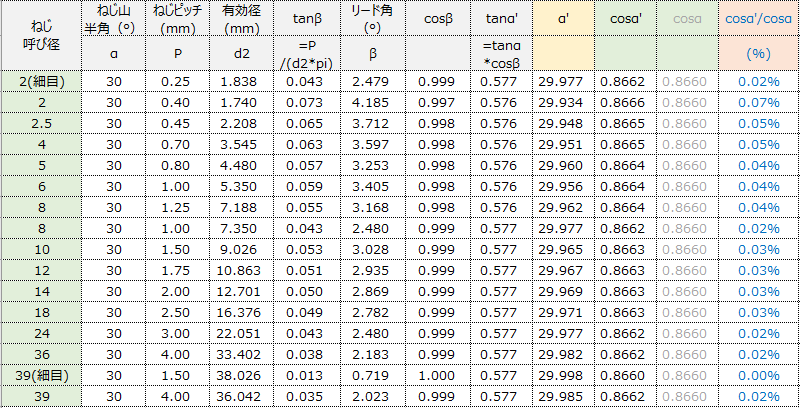
こちらは各ねじ諸元値の有効桁から言っても、近似式としてよいレベル(誤差:1/1000以下)
よって、⑧式にたどり着く。
蛇足ではあるが、近似を使わないのであれば、
\(
\begin{align}
\tt |\vec{U}|
&=\tt |\vec{F}| \tan({\beta+\rho’})=\tt |\vec{F}| \displaystyle \frac{\tan{\beta}+\tan {\rho}’}{1-\tan{\beta}\tan {\rho}’}\\[8pt]
&=\tt |\vec{F}| \displaystyle \frac{\tan{\beta}+\frac {\tan{\rho}}{\cos{\alpha}’}}{1-\tan{\beta}\frac {\tan{\rho}}{\cos{\alpha}’}}\\[8pt]
&=\tt |\vec{F}| \displaystyle \frac{\tan{\beta}+\frac {\tan{\rho}}{\cos({tan^{-1}(\tan{\alpha}\cos{\beta}}))}}{1-\frac {\tan{\beta}\tan{\rho}}{\cos({tan^{-1}(\tan{\alpha}\cos{\beta}}))}}
\end{align}
\)
となる。(ちょっとおあそび)
確かに理論式でこの先展開をしていくには、これではちょっと面倒。もともとバラつきの大きいモノ(摩擦係数)が含まれているしで、机上の不要な精度追及になりかねないっていうのもあるのかな。。。