座標軸の定義
まずは、目の前の3次元の世界で考えていく
(こむずかしくいえば3次元のユークリッド空間)。
ちなみに、高次のユークリッド空間は定義を拡張して、次元を増やしていくだけなので、ここでは詳細割愛。
直交座標系の規則
さて、解析における座標設定時の一般的な規則としては、
(JISでもISOでも同じ定義)
直行系
座標軸の各軸は全て互いに直行 (各軸は互いに影響しない)
右手系
三次元における3つの軸は右手系 (右手の指で定義)
- x軸:親指
- y軸:人差し指
- z軸:中指
(指先の方向が正)
右ねじ系
回転方向の正負は、右ねじ系で定義
回転の正方向とは、各軸の正方向に右ねじを進める方向(時計回り)の回転方法が正
例えば
- z軸まわりの回転は、x軸->y軸方向の回転が正
- x軸まわりの回転は、y軸->z軸方向の回転が正
- y軸まわりの回転は、z軸->x軸方向の回転が正
複数の座標系
空間上の座標系は一つである必要はない。
グローバル座標(絶対空間の定義)、ローカル座標(その空間内を移動する物体に固定された座標)と、複数設定可能。
座標表示
n次元空間上の任意の点の各軸の成分表示として、
- 列方向:\( \left ( \begin{array}{c}
a_{0}\\
a_{1} \\
\vdots\\
a_{n}
\end{array} \right ) \)
もしくは、
- 行方向:\( \left ( a_{0},~a_{1},~\ldots,~a_{n} \right ) \)
で表し、これは列ベクトル、行ベクトルと同じ表記。
例えば、3次元空間上の任意の点のxyz座標は、\( \left ( \begin{array}{c}
x\\
y \\
z
\end{array} \right ) \) もしくは \( \left (x,~y,~z \right ) \) となる。
極座標表示:ピタゴラスの定理から三角関数、極座標表示への展開
ピタゴラスの定理(三平方の定理)
三角関数の導入前にピタゴラスの定理から、
<ピタゴラスの定理>
直角三角形ABCの直角をはさむ二辺の2乗の和 (a2 + b2) は、斜辺の2乗 (c2) に等しい。つまり、
\( a^2+b^2=c^2 \)・・・①
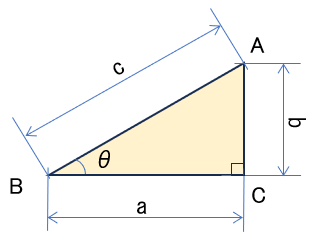
図を使えば理解しやすい。
上の直角三角形ABCを4つ組み合わせた一辺(a+b)の正方形を作り、そこから考える(下図参照)
- 一辺\( (a+b) \) の正方形の面積 S は \( S = (a+b)^2 \)
- S は 一辺cの正方形 と 直角三角形4つ の和となるので、\( S =c^2+ \dfrac{1}{2} ab \times 4 =c^2+ 2ab \)
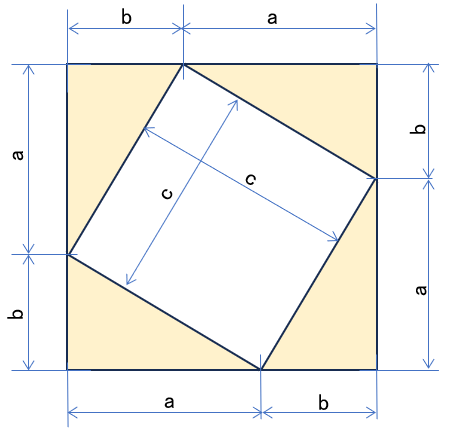
この二つが等しい事から、\( (a+b)^2=c^2+ 2ab \)
この左辺を展開し整理すれば、ピタゴラスの定理 \( a^2+b^2=c^2 \) が出てくる。
(∵ \( a^2+\cancel{2ab}+b^2 = c^2+\cancel{2ab} \) )
<- これがピタゴラスの定理の図解(証明方法はイロイロあるが、たぶんこれが一番とっつきやすい。。)
三角関数と円
さて、前述のピタゴラスの定理で使用した直角三角形ABC の辺BAと辺BCのなす角をθとして、三角関数の定義を行う。
この三角関数の定義をつかえば、直角三角形の各辺の長さ a と b は
\(a = c\cdot cosθ \) , \( b =c\cdot sinθ \) ・・・②
で表され、
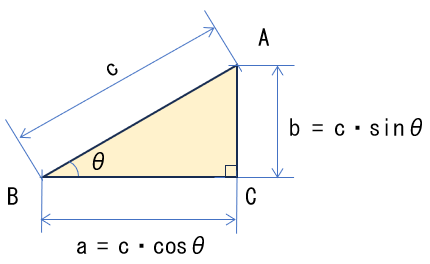
これをピタゴラスの定理(①式)に代入すれば、
\( (c\cdot cosθ)^2+ (c \cdot sinθ)^2=c^2 \)
両辺からcが消して
cosθ と sinθ の基本的な関係式としてよく見るが、とどのつまりは三角関数を使ってピタゴラスの定理を表現しているだけ(言っている事は同じ)。
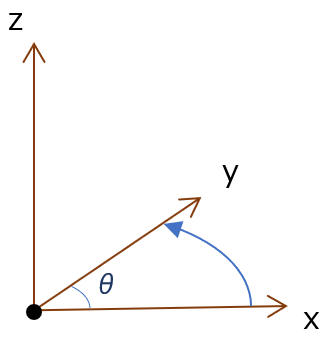
極座標
さて、x-y座標系上の任意の点R \( \left ( \begin{array}{c}
x\\
y \end{array} \right ) \) は、
- 原点Oと点Rの距離:r
- x軸とORのなす角:θ
を使えば、②式(三角関数の定義(右図も参照))から
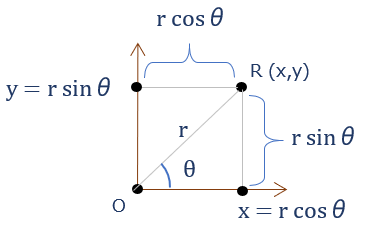
この \( \left ( \begin{array}{c}
x\\
y
\end{array} \right ) \)を r とθ の2変数で表したものを極座標という。
r を一定にθのみを変えていく点の軌跡は、中心からの一定距離rを保った点の軌跡、つまり円。
これから円の公式は、極座標の成分(④式)を、①式のピタゴラスの定理に当てはめて
\(x^2+y^2= (r \cdot cosθ)^2+(r \cdot sinθ) ^2= r^2 ( cos^{2}θ+ sin^{2}θ) \)
③式 ( \( cos^2 θ+ sin^2θ=1 \)) より、\(x^2+y^2= r^2 \) <- 円の公式がでる
ちなみに、極座標表示 (r, θ) にて、θ を一定に r を変えていけば点の軌跡は”直線”を描き、r と θ を共に変えていけば”曲線”を描く。
追記
結局、ピタゴラスの定理も、sin2θ + cos2θ =1 の関係式も、円の方程式(x2 + y2 = r2)も、見方を変えてその特徴を別表現しているだけ。
ちなみに、極座標とわざわざ宣言して使用されているわけではなく、特に曲線/円を描く場合に、x成分、y成分表示として、式の中に普通に紛れ込んでいる。
蛇足:ピタゴラスの定理の図解②
ピタゴラスの定理を(式を使わずに)面積のやり取りで証明するには、以下
ピタゴラスの定理の式を直接確認する方法
(各辺でできる正方形の面積の足し算)
右図のように、”底辺と高さが等しければ、長方形(正方形)と平行四辺形の面積は同じ” をメインに使えば何とかなる。
これでいえば
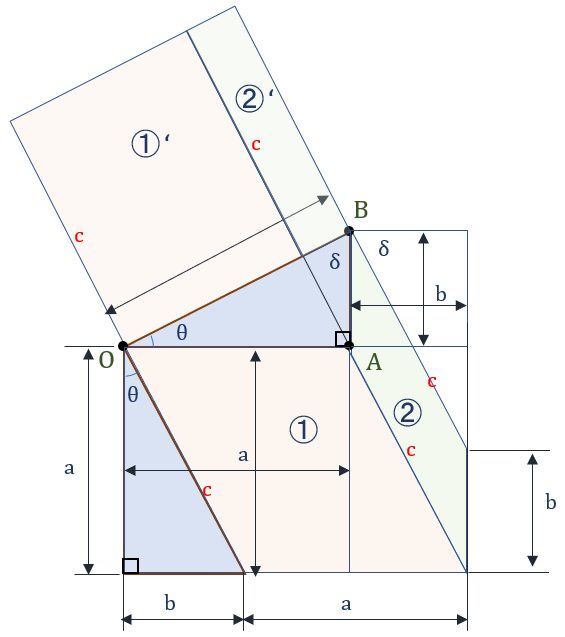
- ”辺OA(長さ a)を一辺とする正方形の面積と平行四辺形①の面積(肌色)が等しいこと” に加え、”肌色の面積同士(①と①’)が等しいこと”
- ”辺AB(長さ b)を一辺とする正方形の面積と平行四辺形②の面積(薄みどり)が等しいこと”に加え、”薄みどり面積同士(②と②’)が等しいこと”
- 辺OB(長さ c)を一辺とする正方形の面積は①’と②’を足した面積と等しい。
<詳細>
まず△OABの各辺a,b,cを長さにもつ正方形を各辺上に作成しておく。
次に、点Bを通りOAに直行する線を引く、これと並行に点Oを通る直線を引き、OAの辺上にaを長さにもつ正方形と高さを合わせた平行四辺形①を作成する。(高さが等しいので正方形と平行四辺形①の面積(肌色①)は同じ)
さてここで、OAの下の⊿OABと合同な三角形(薄青色)から斜辺長c(赤字)を使い、①と①’を比べれば、同じ底辺長(赤字c)、同じ高さのため①と①’の面積(肌色同士)は等しい。
同様にAB上の薄みどり同士もcを底辺とした同じ高さをもつ四角形同士で②と②’は面接同一。さて、①‘と②’を足し合わせた面積は、定義からcを一辺にもつ正方形と等しい。
これからOAから作成した正方形の面積 axa と 辺ABから作成した正方形の面積 bxb の二つを足し合わせた面積は、辺OBから作成した正方形の面積 cxc と等しい。
つまり\( a^2+b^2=c^2 \) となる。